Mobile Robot 2D Motion Estimation and Prediction by Extended Kalman filter (EKF) & Second-order filter (SOF) Algorithm
In this project, we estimate the mobile robot velocity v(k) and angle(k) of the robot from the movie by using the Extended Kalman filter (EKF) and Second-Order Filter (SOF) Algorithm based on the discrete-time model.
|
Soft Fingers with Controllable Compliance to Enable Realization of Low Cost Grippers
Built a soft robotic finger with controllable stiffness. The goal was to redesign a conventional soft finger by integrating a structural member that can be used to control its compliance. The main idea behind our soft robotic fingers lie in embedded sealed chamber which is made up of a non-stretchable polymer sheet. The chamber is filled with floating compliant sheets. When air is pumped out to create vacuum inside the sealed chamber, floating sheets inside the sealed chamber adhere to each other, increasing the friction due to an increase in the contact area. When the structural member is set in low stiffness mode, floating sheets can easily slide with respect to each other due to the sheet separation created by positive air pressure. If air is vacuumed out of the chamber, the sheets are stacked together. This prevents sheets from sliding over each other. This leads to the structural member appearing stiff under bending loads. By controlling the vacuum inside the chamber, we can control the stiffness of the structural member and the finger.
|


Five-DOF Model of Automobiles & Model of Coupled Vehicle-Bridge Systems Vibration Analysis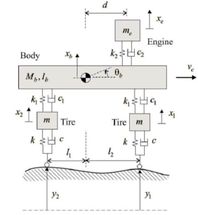
Analyzing multi-body dynamics and distributed linear time-varying vibrating systems. Drive and solve mathematical models of both systems by using Assumed-mode method, Rayleigh Ritz method, and Runge-Kutta method. Plot displacement of the car and beam by using Matlab.
|
Stabilization Control for Motorcycle by Using Gyroscopes and Momentum Wheels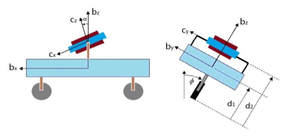
Both of the models generate a torque to neutralize the torque acting on the motorcycle from the outside. These methods have been widely used in satellite attitude control and oceangoing vessels, etc., but have very limited applications in small-scale vehicles. Deriving the equations of motion for gyroscopes......more
|
Machine Vision and Motion Control Lab
Circuit analysis fundamentals & Electronics debug and failure analysis. Schematic capture and PCB layout design and ability to solder SMD PCB components with satisfactory qualification.
8051 calculator, 8051 Alarm Clock, Stepper motor control, Digital voice recorder & player, etc. |
National Central University Supermileage Car
Determined the deflection due to time varying loads on the structure to ensure performance, quality, and safety efficiently. Linear modal analysis was applied to determine the natural modes of vibration and corresponding displacements, stresses, strains, velocities, and accelerations. Nonlinear dynamic analysis was also applied to calculate the displacement field at every time step. From this field, the nonlinear stresses, strains, velocities, and accelerations are obtained.
|
|

Introduction to Machine and Instrument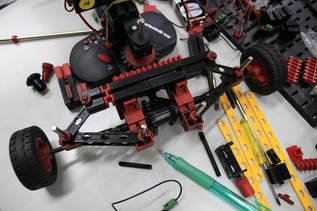
I enrolled in the course Introduction to Machine and Instrument, which featured an end-of-the-semester project competition. My project proposal was accepted by the students in my project team and I was further chosen by them to be project manager. My proposal employed FischerTechnik to design a writing machine and in the process allowed me to bring into play my grasp of mechanical structure design and electric circuit design.
|
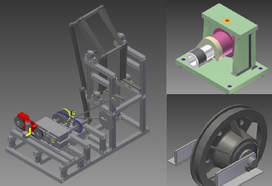
CAMworks & 3D Printing
|
|
